Датчики инкрементального энкодера выдают некоторый выходной сигнал схемы по одной линии передачи.
датчик должен быть подключен к одному контроллеру.
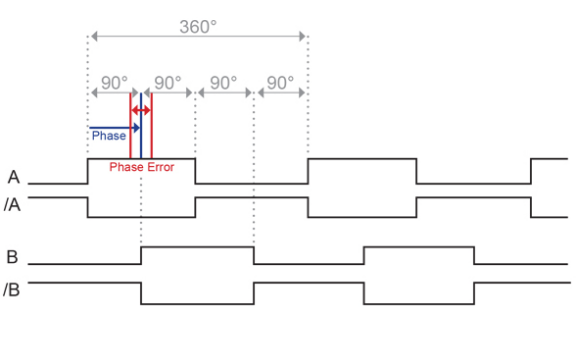
Инкрементальный энкодер имеет как минимум один выходной сигнал фазы «А» или обычно два выходных сигнала, называемых фазами «А» + «В».Эти два сигнала настроены со смещением 90°, которое необходимо для определения вращения энкодера.При повороте энкодера по часовой стрелке импульс «А» поднимается на 90° впереди импульса «В», таким же образом импульс «В» растет впереди импульса «А». когда поворот вала против часовой стрелки.
Кроме того, некоторые инкрементные энкодеры выдают сигнал фазы «Z».При каждом повороте этот сигнал фазы Z обычно увеличивается на 90 ° в том же положении.Это можно использовать как определение точной контрольной точки.
Некоторые другие инкрементальные энкодеры также имеют дополнительные дифференциальные сигналы, называемые «A-», «/B-» и «Z-».Эти сигналы инвертированы из сигналов «A», «B» и «Z».Контроллеры могут сравнивать каждую пару («А» должна быть равна перевернутой «А-»), чтобы убедиться в отсутствии ошибок при передаче сигнала.
Обычно чувствительность передачи улучшается за счет передачи дифференциальных сигналов по витой паре.
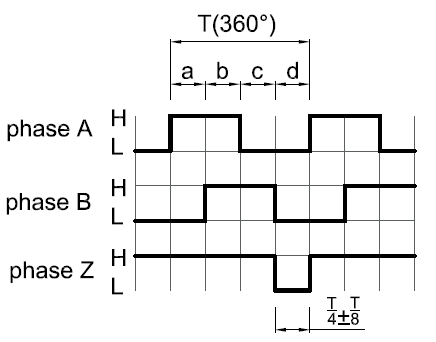
Некоторые типичные импульсные диаграммы инкрементального энкодера
Число импульсов на оборот (PPR):
Инкрементальный поворотный энкодер выдает определенное количество импульсов на оборот.Чем выше это число PPR, тем меньше угол между каждым импульсом.Этот номер PPR фиксирован для обычных инкрементальных энкодеров.
Сегодня большинство инкрементных энкодеров имеют выходной драйвер Push-Pull (который также называется HTL) или RS422 (TTL). Они заменили большинство старых выходных схем, таких как NPN с открытым коллектором, PNP с открытым коллектором, выход напряжения.
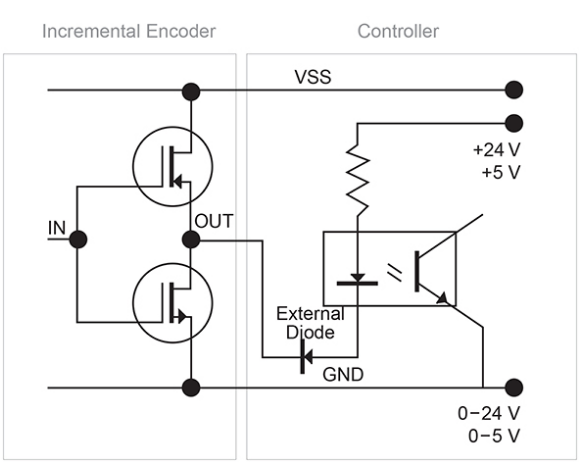
А) Двухтактный выходной сигнал (HTL)
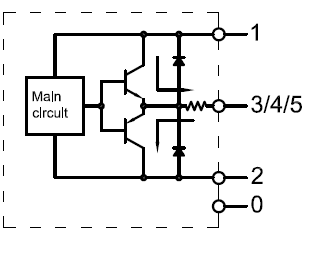
Двухтактные схемы (HTL), также известные как схемы тотемного полюса, обеспечивают уровень сигнала, соответствующий приложенному напряжению питания.Напряжение питания обычно находится в диапазоне от 8 до 30 В постоянного тока или в широком диапазоне от 5 до 30 В постоянного тока.
При правильном подключении вы можете использовать интерфейс Push Pull для замены настоящих цепей с открытым коллектором, используя внешний диод, подключенный таким образом, чтобы ограничить направление тока.
Б) Выходной сигнал RS422 (TTL)
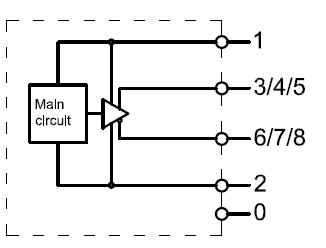
Цепи RS422 (TTL) обеспечивают постоянный уровень сигнала 5 В, не зависящий от напряжения питания.Можно выбрать два диапазона напряжения питания: от 4,75 до 5,5 В постоянного тока (может использоваться для замены выходных драйверов с открытым коллектором) или от 5 до 30 В постоянного тока.При использовании дифференциальных сигналов выход полностью соответствует стандарту RS422.
Дифференциальные выходы имеют самую высокую частотную характеристику и лучшую помехоустойчивость.
Для этого приемник также должен представлять собой дифференциальную схему.
Замена кривого некоторых старых драйверов вывода
1) Замена открытого коллектора PNP (источник тока)
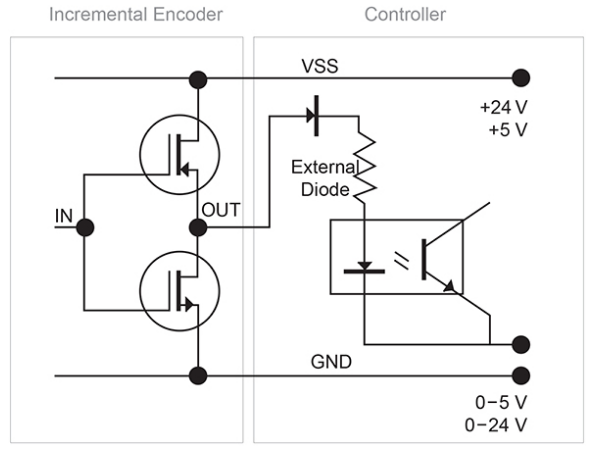
2) Замена открытого коллектора NPN (Current Sink)
Уровни выходного напряжения:
Логический вентиль интерпретирует определенные входные напряжения как высокие (логическая 1) или низкие (логический 0).
TTL (транзисторно-транзисторная логика): сигнал выше 2 В интерпретируется как логическая 1, а сигнал менее 0,8 В интерпретируется как логический 0. Выходное напряжение находится в диапазоне 0–5 В.
HTL (логика с высоким порогом): сигнал выше 3 В соответствует логической 1, а сигнал ниже 1 В соответствует логическому 0. Высокий уровень выходного сигнала зависит от напряжения питания.Из-за более высокой разницы напряжений между логикой 0 и 1 логика HTL более устойчива к помехам и более устойчива к электрическим помехам.
| Логика | Уровень сигнала | Напряжение питания | Выходное напряжение |
| ТТЛ | Высокий | 5–30 В | мин 3 В |
| Низкий | 5–30 В | макс 0,5 В |
| HTL | Высокий | 5–30 В | мин 3 В |
|
| 8–30 В | минимальное напряжение питания - 3 В |
| Низкий | 5–30 В | макс 0,5 В |
Электрическое и механическое образование:
Механический градус — это фактическое вращение вала в градусах.Электрическая степень используется для электрических сигналов.Требуемое время для завершения одного цикла переменного напряжения/тока определяется как 360 электрических градусов (эл°).
Для инкрементальных энкодеров один цикл равен одному полному импульсу.При заданном PPR электрическая степень может быть преобразована в механическую степень для любого инкрементального энкодера.
Квадратура:
Каждые 90 градусов инкрементный энкодер выдает нарастающий или спадающий фронт на выходе «A» или «B», который можно интерпретировать как счет.Если энкодер выдает 1000 импульсов в минуту, счетчик может интерпретировать 4000 отсчетов (4 отсчета на каждый импульс).
Угол фазы:
Фазовый угол указывает длину между двумя краями, заданную в el°.Этот параметр обычно задается с определенным постоянным значением фазового угла и ошибкой фазового угла (также называемой квадратурной ошибкой).
Точность :
Точность представляет собой ошибку фазового угла как абсолютную величину, выраженную в (механических) градусах.
Инкрементальный энкодер выдает определенное количество импульсов за оборот, поэтому ожидается, что каждый импульс будет находиться в определенной механической позиции.Максимальное отклонение между этим идеальным положением и фактическим положением называется интегральной нелинейностью.точность является важной ценностью, если инкрементальный энкодер используется для задач позиционирования.
Рабочий цикл:
Рабочий цикл описывает соотношение между «высоким» временем и «низким» временем инкрементального энкодера.Обычно это соотношение составляет 50/50, что эквивалентно 180 эл° вверху и 180 эл° внизу.
Производительность инкрементных энкодеров увеличивается с увеличением настроек PPR и более высокой скоростью вращения (об/мин).В этом отличие от оптических энкодеров, производительность которых снижается.Точность, указанная в наших технических характеристиках, является наихудшим значением. Лучшей производительности можно ожидать при более высоких значениях PPR и RPM.
Частотная характеристика:
Это максимальная частота, которую энкодер может выводить через выходные линии.
Например, частота энкодера 1024 PPR, вращающегося со скоростью 1757 об/мин, составляет 300 КГц (30 000*1024/60 с).
Если у вас все еще есть какие-либо сомнения относительно теории инкрементального энкодера, пожалуйста, свяжитесь с нашим техническим специалистом, чтобы получить дополнительную поддержку.
электронная почта: heng@shhxgd.cn















