Что такое инкрементальный энкодер
Инкрементный поворотный энкодер обеспечивает циклические выходные данные (только) при вращении энкодера.Они могут быть механическими, оптическими или магнитными.Механический тип требует устранения дребезга и обычно используется в качестве цифровых потенциометров на оборудовании, включая потребительские устройства.В большинстве современных домашних и автомобильных стереосистем для регулировки громкости используются механические поворотные энкодеры.Поскольку механические переключатели требуют устранения дребезга, скорости вращения механических переключателей ограничены.Инкрементальный поворотный энкодер является наиболее широко используемым из всех поворотных энкодеров из-за его низкой стоимости и способности выдавать сигналы, которые можно легко интерпретировать для получения информации, связанной с движением, например скорости.
Тот факт, что в инкрементальных энкодерах используются только два датчика, не ухудшается их разрешение.На рынке можно найти инкрементные энкодеры со скоростью до 10 000 отсчетов за оборот и более.
Может быть необязательный третий вывод: ссылка или «индекс», который происходит один раз за ход.Это используется, когда требуется абсолютная привязка, например, в системах позиционирования.Выходной индекс обычно обозначается Z.
Оптический тип используется, когда встречаются более высокие скорости или требуется более высокая степень точности.
Инкрементные энкодеры используются для отслеживания движения и могут использоваться для определения положения и скорости.Это может быть как линейное, так и вращательное движение.Поскольку направление можно определить, можно провести очень точные измерения.
Они используют два выхода, называемые A и B, которые называются квадратурными выходами, поскольку они сдвинуты по фазе на 90 градусов.
Диаграмма состояний:
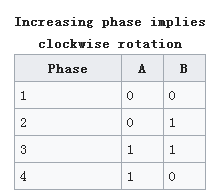
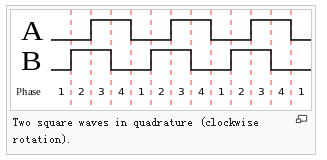
Две формы выходного сигнала сдвинуты по фазе на 90 градусов, что означает квадратуру.Эти сигналы декодируются для создания импульса прямого счета или импульса обратного счета.Для программного декодирования выходы A и B считываются программным обеспечением либо через прерывание по любому фронту, либо посредством опроса, а приведенная выше таблица используется для декодирования направления.Например, если последнее значение было 00, а текущее значение — 01, устройство переместилось на полшага по часовой стрелке.Механические типы сначала будут устранены путем требования, чтобы одно и то же (действительное) значение было прочитано определенное количество раз, прежде чем распознавать изменение состояния.
На энкодерах с фиксаторами существуют разные способы переключения состояний.В некоторых случаях и A, и B всегда разомкнуты в фиксаторах, и при переходе от одного фиксатора к другому происходит весь цикл переключения 00 → 00.Другие имеют фиксаторы с чередующимися значениями 00 и 11 с разным временем переключения при переходе между фиксаторами.
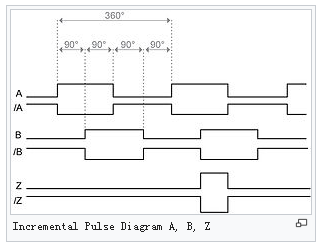
Кроме того, некоторые инкрементные энкодеры выдают сигнал «Z».При каждом повороте этот сигнал Z обычно поднимается на 90 (электрических) градусов точно в том же положении.Это можно использовать в качестве точного ориентира.Некоторые инкрементные энкодеры также имеют дополнительные дифференциальные сигналы, называемые «/A», «/B» и «/Z».Эти сигналы являются инвертированными сигналами «A», «B» и «Z».Контроллеры могут сравнивать каждую пару («A» должно быть равно инвертированному «/A»), чтобы убедиться в отсутствии ошибок во время передачи.
Наблюдатель, например микропроцессор, будет считывать (выбирать образцы) выходные данные кодера.Наблюдателю необходимо достаточно часто проверять выходные данные кодировщика, чтобы не пропустить ни одного изменения кода.Если энкодер вращается слишком быстро, наблюдатель может пропустить изменение выходного сигнала энкодера, поэтому наблюдатель увидит недопустимый переход, например 00 → 11, и запутается.При этом переходе наблюдатель не знает, в какую сторону повернул энкодер: он мог пойти вперед (00 → 01 → 11) или назад (00 → 10 → 11).Если энкодер вращается еще быстрее, то несколько изменений выходного сигнала могут быть пропущены, и наблюдатель может неправильно определить направление.Рассмотрим последовательность движения вперед 00 → 01 → 11 → 10 (3 шага вперед).Если энкодер вращается слишком быстро, наблюдатель может увидеть только первый (00) и четвертый (10) выходные данные и сделать вывод, что кодирование выполнило правильный переход 00 → 10 (1 шаг назад).
Тот же принцип используется в шариковых мышах для отслеживания движения мыши вправо/влево или вперед/назад.
Поворотные энкодеры с одним выходом (т. е. импульсные датчики) не могут использоваться для определения направления движения.Они хорошо подходят для систем, измеряющих переменные скорости движения.В некоторых приложениях их можно использовать для измерения расстояния движения.












